

T25 VTOL R & D Record 6 - Le cose buone, ricominciano!
Recentemente, la dinamica di T25 non è stata aggiornata e si intendeva mostrare i risultati fase per fase, ma ha incontrato una serie di problemi. Affrontare e risolvere i problemi fa parte della ricerca e dello sviluppo e deve essere documentato affinché più persone possano farvi riferimento.
Errore 1: Modulazione elettrica multi-rotore
Modalità Dshot avvio non riuscito Questo piano di utilizzare la modulazione elettrica Dshot per controllare la velocità del motore, la configurazione ha occasionalmente riscontrato il problema che il motore non gira, non ha attirato abbastanza attenzione. Ciò ha causato problemi più gravi nei test all'aperto, di solito passavo prima alla modalità automatica, poi sbloccavo, ma il motore anteriore destro non girava, gli altri tre motori giravano, e l'aereo andava dritto verso destra sul terreno.
Se lo sblocchi prima e poi passi alla modalità automatica, puoi scoprire se il motore rimane inattivo durante il processo di sblocco. La modalità Dshot non è raccomandata per il momento a causa della sua bassa affidabilità. In seguito, è previsto un sondaggio elettrico DroneCAN per controllare la velocità.
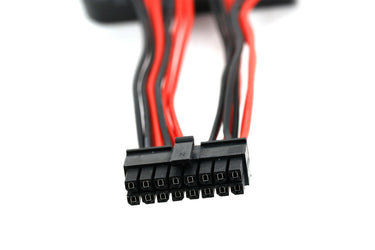
Errore 2: la regolazione elettrica multi-rotore ha accidentalmente causato un cortocircuito e bruciato
Quando si è preparati a testare la resistenza di un carico di 5KG, proprio quando la velocità di minimo del motore è stata sbloccata, un cortocircuito elettrico ha causato scintille e presto ha bruciato in nero. Alcuni controlli hanno rivelato che la piastra di carbonio sotto la base del motore ha usurato l'elettrodo positivo e la linea di fase della regolazione elettrica, causando un cortocircuito nel lavoro di regolazione elettrica. Poiché non si trattava di una regolazione elettrica finita, ci sono volute 2 settimane per sostituire la regolazione elettrica.
Errore 3: Aereo a decollo fisso con cambio multi-rotore fase di ritorno oscillazione del beccheggio
Prima che il movimento del beccheggio fosse considerato un problema della forza di frenata, della distanza di ritorno e del PID dell'asse di beccheggio del multi-rotore, i parametri che possono essere regolati sono stati spostati nuovamente, ma il miglioramento non è stato evidente. Alla fine, si è scoperto che il misuratore di velocità dell'aria è influenzato dal flusso d'aria del multi-rotore, e la fluttuazione della velocità dell'aria causa la fluttuazione dell'atteggiamento di beccheggio. Questo problema può essere risolto posizionando temporaneamente il misuratore di velocità dell'aria nel muso, che è meno disturbato dal flusso d'aria del multi-rotore.
Errore 4: La rotazione causa un cambiamento della bussola e l'EKF diventa rosso
La macchina non ha trovato questo problema prima, è apparso dopo la sostituzione della regolazione elettrica, e la ricalibrazione della bussola non ha migliorato la situazione. Infine, le tre linee di fase della modulazione elettrica del tail push sono state mescolate in un'unica treccia, in modo che le variazioni del campo magnetico causate dalle correnti in entrata e in uscita si compensino. Il volo di prova ha mostrato di nuovo una bussola normale.
Errore 5: Analisi del processo di crash T25
Fase 1: Dopo che il misuratore di velocità è stato installato nel muso, la velocità dell'aria è maggiore della bassa velocità, causando la protezione dell'aereo a bassa velocità. La ragione per l'analisi preliminare è che il misuratore di velocità è collegato solo con il tubo di pressione dinamica, e la pressione statica è meglio sigillata nella cabina, causando l'errore di pressione.
Fase 2: Il tubo di pressione statica e il tubo di pressione dinamica del misuratore di velocità dell'aria sono collegati contemporaneamente, e si scopre che la velocità dell'aria aumenta molto lentamente, e la velocità di terra è molto maggiore della velocità dell'aria, il che indica con alta probabilità che il tubo di pressione statica è influenzato. L'emergenza ha preso il controllo della modalità a punto fisso del multi-rotore, ma la velocità dell'aria ha oscillato notevolmente, causando grandi fluttuazioni nell'atteggiamento di beccheggio dell'aeromobile, rendendo difficile il controllo, e infine è precipitato sul tetto di ferro della fabbrica abbandonata, frantumandosi.
Riepilogo della Fase I di T25 e prospettive per la Fase II
Sebbene la durata della batteria del T25 fase I non sia stata ancora testata, abbiamo verificato approssimativamente l'efficienza aerodinamica dell'ala in schiuma, compreso a fondo la differenza tra la resistenza teorica e quella reale della macchina in schiuma, e abbiamo anche ricevuto molti suggerimenti e feedback da amici che si interessano al T25. Incorporeremo le lezioni apprese dalla prima fase nella seconda fase della macchina di test T25. La fase II del T25 adotta un design a coda a T invertita, un'apertura alare di 3,2 m, un pacchetto di alimentazione 12S, utilizza 4 batterie a stato solido 6S30000mah, carico stimato di 3KG, autonomia di 250-300KM, il carico massimo può raggiungere 5KG, treppiede pieghevole, la lunghezza massima dopo il confezionamento non supera i 1,5 metri. Le cose buone richiedono tempo, partiamo dall'inizio, rimanete sintonizzati.




























{kind=link}